Використання космічних навігаційних систем стає можливим після встановлення на транспортний засіб спеціального приймача, який постійно отримує сигнали про місцезнаходження та відстань до об’єктів та перешкод від навігаційних супутників.

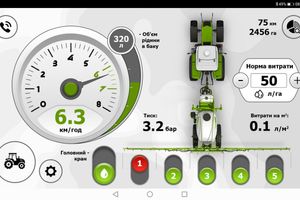
Система паралельного водіння – це управління сільгосп.машинами за допомогою програми яка обробляє дані відхилень, отримані із супутників, і автоматично коригує рух транспорту, а всі отримані данні відображує на табло дисплею в реальному часі
Дисплей у графічному вигляді зображує поточне положення транспортного засобу щодо заданої ділянки і забезпечує водія всієї необхідної для точного пересування інформацією, і так само допомагає в проходженні складних ділянок та проходженні перешкод
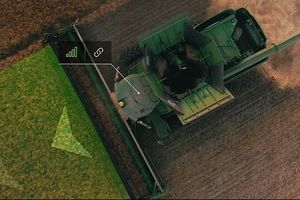
Система паралельного водіння є найбільш наочною і швидко окупною частиною технології точного землеробства. Вона призначена для проведення польових робіт і найбільш ефективна в умовах застосування з широкозахватною технікою.
Найпростіша система паралельного водіння складається з GPS-приймача з зовнішньою антеною і дисплею з програмою. Система легко і швидко встановлюється на трактор або комбайн. Потрібно лише підключення до електроживлення і установка зовнішнього блоку (GPS-приймач).
Навчання механізаторів роботі з даним видом обладнання, в залежності від бажаної «глибини» вивчення, складає від декількох хвилин до доби.
Необхідно відзначити, що використання приладів паралельного водіння з точністю ведення агрегату ±30 см використовується, в основному, на внесення добрив і обприскуванні.
Для проведення більш точних робіт: ґрунтообробки, посіву, захисту рослин, збирання і ряду інших операцій потрібно більш висока точність ведення агрегату, в цьому випадку широко застосовуються автопілоти

Основна перевага використання систем паралельного водіння – зменшення помилок, зведення до мінімуму людського фактора при обробці полів. Практика показує, що при обприскуванні культур традиційним способом більшість операторів воліють проходити сусідні ряди з перекриттям, щоб уникнути пропусків. У результаті взаємне перекриття рядів, навіть з використанням пінних маркерів, становить не менше 5 %. Застосування агронавигаторов і систем паралельного водіння знижує перекриття до 2- 3% і менше.