Использование космических навигационных систем становится возможным после установки на транспортное средство специального приемника, постоянно получающего сигналы о местоположении навигационных спутников и расстояниях до них.
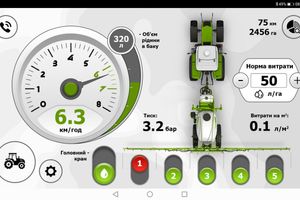
Система параллельного вождения – это управление сельхоз машиной по средствам передачи полученных со спутников координат, обработка отклонений и корректировка движения с учетом получаемых данных в реальном времени с отражением всех данных на табло.
Система параллельного вождения является самой наглядной и быстро окупаемой частью технологии точного земледелия, предназначена для проведения полевых работ и наиболее эффективна в условиях применения с широкозахватной техникой.
Самая простая система параллельного вождения состоит из GPS-приемника с внешней антенной и указателя курса. Системы легко и быстро устанавливаются на трактор или комбайн. Требуется только подключение к электропитанию и установка внешнего блока (приемник GPS).
Обучение механизаторов работе с данным видом оборудования, в зависимости от желаемой «глубины» изучения, составляет от нескольких минут до суток.
Необходимо отметить, что использование приборов параллельного вождения с точностью ведения агрегата ±30 см используется, в основном, на внесении удобрений и опрыскивании.
Для проведения более точных работ: почвообработки, посева, защиты растений, уборки и ряда других операций требуется более высокая точность ведения агрегата, в этом случае широко применяются автопилоты

Основное преимущество использования систем параллельного вождения – уменьшение ошибок (сведение к минимуму человеческого фактора) при обработке полей. Практика показывает, что при опрыскивании культур традиционным способом большинство операторов предпочитают проходить соседние ряды с перекрытием, чтобы избежать пропусков. В результате взаимное перекрытие рядов, даже с использованием пенных маркеров, составляет не менее 5 %. Применение указателей курса, агронавигаторов и систем параллельного вождения снижает перекрытие до 2…3 % и менее.
Дисплей в графическом виде отражает текущее положение транспортного средства относительно заданного участка и обеспечивает водителя всей необходимой для точного передвижения информацией, а так же помогает в прохождении сложных участков и прохождении препятствий